TP
Setup phase
- Setup phaseCurrent phase
- Task info The workshop is currently being set up. Please wait until it is switched to the next phase.
- Submission phase
- Assessment phase
- Grading evaluation phase
- Closed
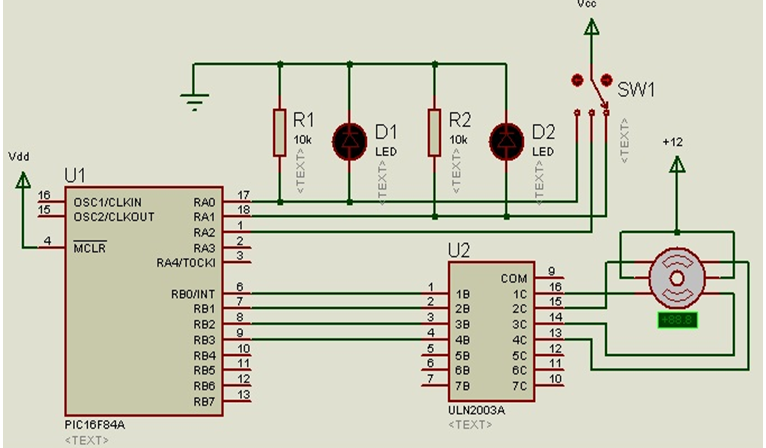
Le but de cette application est commande le sens de rotation d’un moteur pas à pas à l’aide d’un PIC16F84A. Les composons utiliser sous ISIS sont : SW-ROT-3, LED-RED, MOTOR-STEPPER, PIC16F84A, ULN2003A, RES (10kΩ).
- Utiliser une alimentation supplémentaire (+12) pour fournir la puissance nécessaire au moteur Pas à pas.
- Utiliser le driver ULN2003A pour piloter le moteur.
- Utiliser le switch SW1 pour changé le sens de direction du moteur
1. Ecrire le programme qui permet de contrôle le sens de rotation du moteur par l’intermédiaire du driver ULN2003A.
Rappelle :
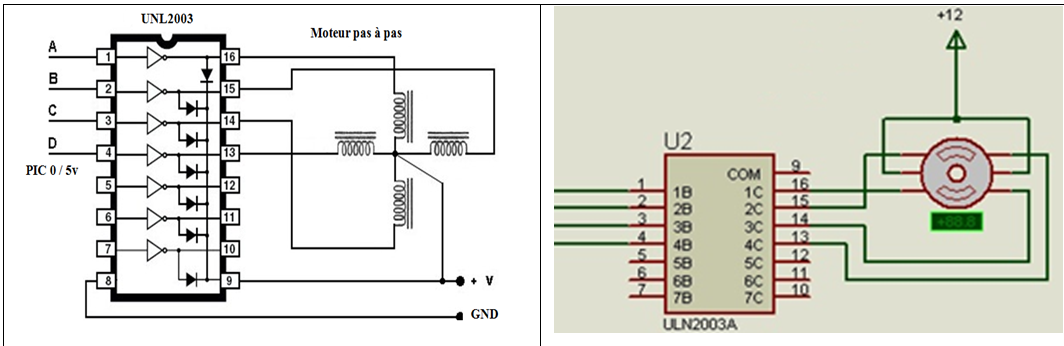
Les moteurs pas à pas sont très pratiques car ils permettent de faire tourner leur axe d'un angle précis. Un moteur pas à pas bipolaire est composé de 4 fils couplés deux par deux aux bobines constituant le moteur.
Pour faire commander et contrôler un moteur pas à pas par un microcontrôleur. Nous allons utiliser un composant de contrôle: le circuit intégrée ULN2003.
|
1C : connecté à la 1ere bobine du moteur. |
1B : pour commander la 1ere bobine du moteur. |
|
2C : connecté à la 2eme bobine du moteur. |
2B : pour commander la 2eme bobine du moteur. |
|
3C : connecté à la 3eme bobine du moteur. |
3B : pour commander la 3eme bobine du moteur. |
|
4C : connecté à la 4eme bobine du moteur. |
4B : pour commander la 4eme bobine du moteur. |